- All Categories
- ELECTRONICS
-

-
Autonomous-Webserved-Tanktrack-Robot


Autonomous-Webserved-Tanktrack-Robot
by donboy, published Dec 17, 2014
$9.89
SummaryA bolt together modular tank style robotics platform!
Print request
Free .stl file
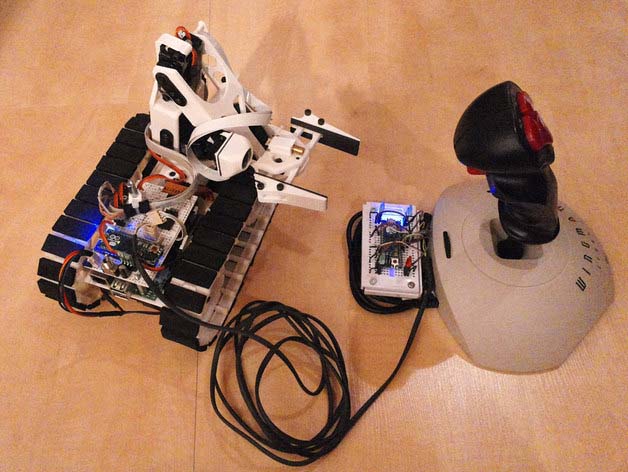
DOWNLOADSummary Start a new project merging several skills in one task. This is my tank track robot controlled by a Raspberry Pi using a webservice. You can control the robot over dynamic website with webcam view. The RSPI also provides RPI-Wireless-Hotspot, so it is possible to connect directly with your smartphone. An Arduino-Micro communicates to the RSPI over I2C and controls 8 servos. Also a battery state monitor is implemented. I decide to use standard AA Accus for powering with 2 rows a 5x 1,2 volt. A step-up/ step-down switching voltage regulator guaranteed 5 volt supply despite low battery. See latest video on: https://www.youtube.com/watch?v=D2brukbh378
Updates: 07/07/15: Project goes on. Currently, the main problem is the power, respectively the duration of the battery power supply. 1 camera, 8 servos, 2 controller, web service, and Wi-Fi hotspot consume a total of 2.5 amperes. Maybe I wanted to solve too much at once :-(( My aim is: Remote-controlled robot with camera. Looking for an alternative video transmission system without web service
02/26/15: Add Tank-Track for 1.75mm Filament rod.
02/05/15: Software implemented. RSP used as WLAN Hotspot with Webserver -> communicates to Arduino over serial - Arduino over I2C to PCA9685. RSPI won't work in Multislave I2C Mode :-((
01/21/15: Fault in the electrical circuit improved. MOSFET got too little voltage on UGS -> reduced resistance
01/20/15: Build new Battery-Pack for more current available. Using 16 x AA á 6V (4 x 4 pack)
01/19/15: Implements PCA9685. Works fine! First trial without RSP for verfication of trigonometric calculation on Arduino.
01/08/15: First trial completed. Built a experimental arrangement with a old joystick and a second Arduino-Micro which simulates the RSPI-I2C communication (see image). ARGHH! Huge twitching of the servos because Arduino is overloaded with I2C and 8 servos! Special servo driver ordered (Adafruits-PCA9685) to save Arduino-Performance.
01/06/15: Add layout extension board preview. Not checked if all works - release of eagle file after validation by function.
12/28/14: Laser pointer moved to the middle of the gripper - now i can point to the thing i want to grip exactly. -Change cam to a RSPI-Wide-Angle Cam. In fact this camera is much lighter than the first one! -Change arm wiring! Because of problems with bending and buckling the wires between the servos i decide to route them on the side which made it necessary to implement the cam to the other side. So add 2 additional cable guides. (see new images)
12/21/14: The chassis is wide enough now.It is not necessary to desolder the cinch video connector.
This is a work-in-progress project and wil bee updated regularly ;-)
Instructions I unsolder the Cinch-Connector from the RSPI because i don't need it and it wasted to much space.
Track: Include .dxf File with construction drawings. The track was designed for 65mm diameter wheels with 30 degree splitting for joints, each 5mm diameter. So if you want to change the track, use this file and design your own.
No instructions so far.
BOM: Raspberry PI B Ver.2 Raspberry CAM M12 Lens Mount 1,47mm IR Lens (fisch-eye) Arduino Micro 4x Strong Standard Servos 2x Hacked Standard Servos (for continuous rotation) 1x Mini Servo (for gripper) 1x Micro Servo (for cam) Battery Pack 10x AA M3 Bolts & Nuts some electronic components for interface card
Printing details not available.